Projects on Robotic Applications for Engineering Students
In the area of robotics, it is important to deal with design, operation, construction, structural disposition, manufacture and application of robots. Using computer technology one can work on their control, sensory feedback, and information processing using appropriate hardware and sensors. Many motors are used in robotics which is controlled through dedicated micro-controllers with appropriate program. Therefore, language knowledge in assembly and ‘C’ is a must to design robotic applications.
Nowadays many engineering students showing lot of interest on robotics projects and they create lot of interest as compared to others. Robots such as line following, pick n place, firefighting, wall tracking, hexapod, humanoid etc are few popular projects in academic level.
Following are the few interesting Robotics Projects Ideas for final year engineering students:
- RF Controlled Robotic Vehicle with Laser Beam Arrangement - Abstract.
- Line Following Robotic Vehicle - Abstract.
- Pick & Place With Soft Catching Gripper – Abstract.
- Fire Fighting Robotic Vehicle using Microcontroller– Abstract.
- RF controlled robot with Night Vision Wireless Camera for Spying in War Field – Abstract.
- Microcontroller Based Line Following Robotic Vehicle– Abstract.
- Obstacle Avoidance Robotic Vehicle using Ultrasonic Sensor – Abstract.
- Auto Metro Train to Shuttle between Stations – Abstract.
- IR Controlled Robotic Vehicle – Abstract.
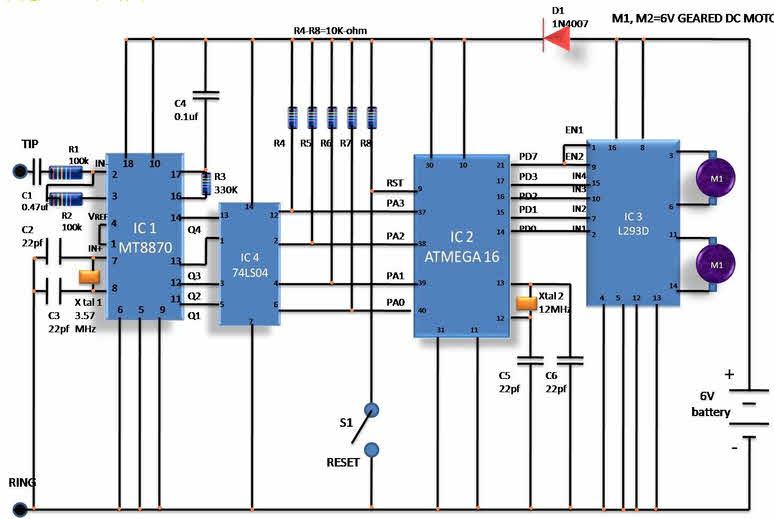
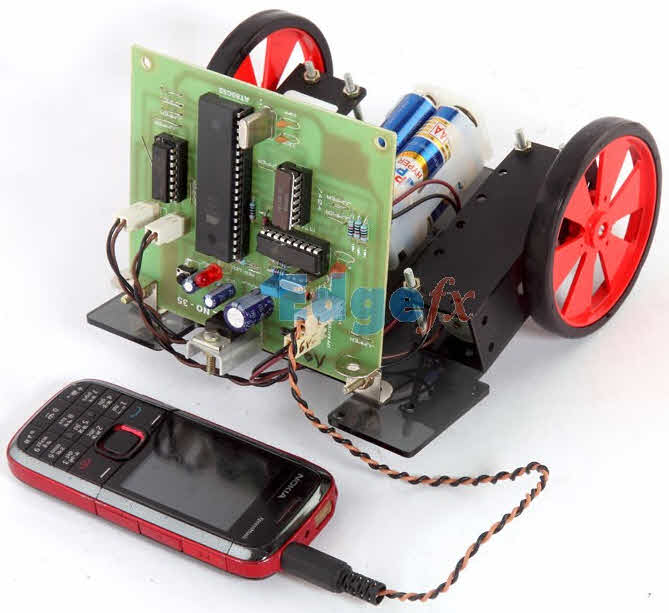
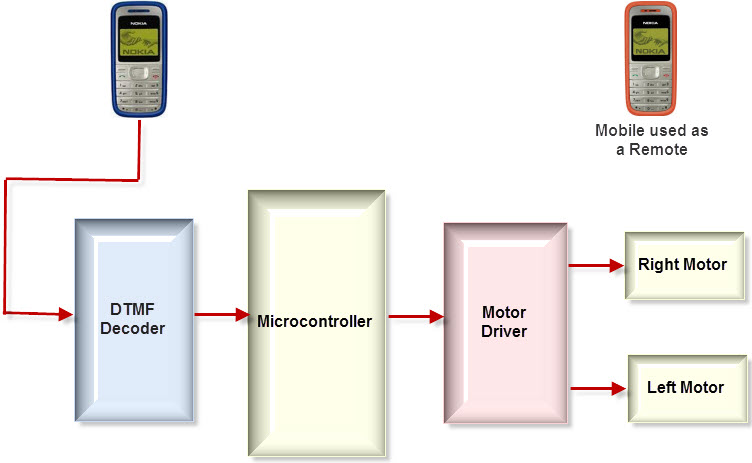
- Cell Phone Controlled Robotic Vehicle – Abstract.
- Metal Detector Robotic Vehicle – Abstract.
You may get the block diagram and output video details of the above projects along with the abstract by clicking on the “abstract” links.
Please check the below Robotics Live Projects
Line Following Robotic Vehicle
A Line Following Robot is a robot which follows a certain path on which it moves. The path can be a black path on a white floor or a magnetic field. These robots are being used in a variety of applications from being a guide at public places to automatic vehicles. Here a Line Following robotic vehicle is developed which is made to move on a curved black path sensed by a pair of sensors for each motor.
Here the robotic vehicle consists of two motors and the DC supply to each motor is controlled using a transistor which acts as a switch. A pair of sensors each comprising of an IR LED and a photodiode are placed beneath the circuit. The white floor is sensed by the sensors and the motors are given the rotation accordingly. At the turning, on encountering the black path, one of motors stop rotating with the sensor input. The sensor works on the principle that when light from the IR LED falls on the white surface it gets reflected and this reflected light when falls on the photodiode, reduces its resistance so as to control the conduction of the motor switch.
Metal Detector Robotic Vehicle
A robotic vehicle is designed which serves the purpose of detecting metals. Such robots can be used to detect landmines at places. Landmines are explosive devices which are placed under the ground and it is very dangerous to detect those manually using metal detectors. Here a metal detector is embedded to the robot circuit and the robot is controlled using RF communication.
At the transmitter side, number of push buttons is interfaced to the microcontroller to provide required motion to the robot. When any button is pressed the command is send to the microcontroller which delivers a binary data for the button and the parallel data is converted to serial data using encoder and this command is transmitted using RF module.
At the receiver side, this command is decoded by the Decoder and based on the command; microcontroller gives relevant signals to the motor driver to drive the two motors to give the robot the desired motion. A metal detector is embedded to the circuit which detects any metal and accordingly gives an indication using a buzzer.
Obstacle Avoidance Robotic Vehicle
A robot can be controlled either by detecting the environment on its own or manually using a remote or any other means. Here a fully automatic robot is developed which senses the area around it and accordingly moves. A sensor arrangement is embedded which senses any objects ahead of it and accordingly the robot changes its direction to avoid any collision. Such robotic vehicles can be used at places like sanctuaries etc.
Ultrasonic sensor is used to detect presence of any obstacle. These sensors work on the principle of reflection of ultrasonic waves by the objects which is received by the sensors and converted to electrical signals. On receiving any interruption signal, the microcontroller thus gives proper command to the motor driver such that one of the motor is stopped and other motor rotates, giving a change in direction to the robot.
Pick N Place Robotic Vehicle with Soft Catching Gripper
A robotic vehicle can be used to pick up objects and place it accordingly. For this purpose the robots consist of end effectors whose moment is controlled accordingly using motors. The robotic vehicle is controlled remotely by a set of buttons using RF communication.
At the transmitter side, a keypad is interfaced to the microcontroller and when a relevant key is pressed, the microcontroller generates a binary code for that key and this binary code is converted to serial form and sends through a RF module and an RF antenna.
At the receiver, two motors are used to give relevant motion to the robotic vehicle and another two motors are used to control the movement of the gripper to hold any object and place it on the desired place. The commands send from the transmitter are decoded and used by the microcontroller to give proper signals to the motor driver ICs.
RF Controlled Robotic Vehicle with LASER Beam Arrangement
One of the major applications of Robotics is in military. They can be used to survey enemy lands, detect and destroy targets. A Robot can be embedded with a LASER gun which can emit strong focused monochromatic light that can actually harm the targets or produce a spot on the target to make them easier to be detected. Here a simple prototype of such a robotic vehicle is designed which is embedded with a LASER pen and controlled using RF communication.
War Field Spying Robot with Night Vision Camera
A robotic vehicle is designed which consists of a wireless camera that can take images even in dark and wireless transmit these images to a TV receiver unit. These robots are frequently used in military to spy on enemy lands and send the information to the controlling unit. Here this robot is controlled using RF communication by a set of push buttons.
Fire Fighting Robotic Vehicle
Robots can be used in many hazardous situations like when a fire accident occurs. Here such a prototype is demonstration which consists of a water pipe with a nozzle and a pump. The movement of the robot as well the spraying of water by the nozzle is controlled remotely using a set of push buttons and the commands are transmitted the robot through RF communication.
Line Following Robotic Vehicle with Microcontroller
Here a line following robotic vehicle is designed which is controlled using a microcontroller. Here one pair of sensors are used to sense the path and based on the input, the microcontroller gives proper commands to the motor driver IC to drive the motors accordingly.
Touch Screen based Remote Controlled Robotic Vehicle for Stores Management
Here a pick and place robot is developed which is controlled using RF communication. A touch screen panel is used to give commands which are transmitted and received by the robot to give proper motion to the robot in the desired direction and control the pick and place operation.
Auto Metro Train that Shuttles between Two Stations
An automatic train is developed with automatic start and stop mechanism such that the train stops at a particular station and starts moving after a certain time. It also consists of a mechanism to automatically open and close the door and counts the number of persons entering the train.
List of some more robotics projects ideas for engineering students:
- Accelerometer (Gyroscope) Controlled Robot
- Radio Frequency (RF) Controlled Wireless Robot
- Voice operated robot with speaker identification technology
- Computer controlled Pic and Place Robot (wired or wireless)
- Zigbee controlled Boat with wireless video and voice transmission with night vision capability
- Autonomous Robot with artificial vision for obstacle detection
- Smoke and LPG Gas detection robot with wireless control
- Visible light follower Robot
- Android mobile phone controlled bluetooth robot
- Wireless operated War field spying Robot with night vision wireless camera
- Construction of flying Quad Rotor Chopper with Video camera surveillance system
- Digital Compass and GPS based self navigating Robot
- Bomb detection Robot
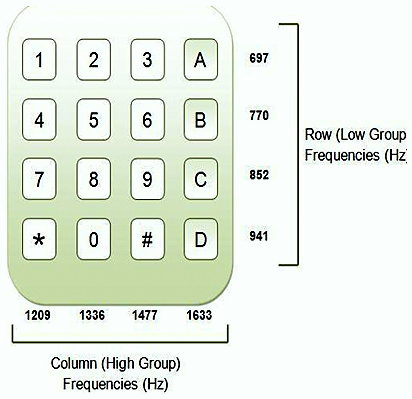
- DTMF based humanless Robotic boat control for ocean research application
- Wifi robot controlled from Android smart mobile phone
- Wireless room freshener spraying robot with video vision
- DTMF based Mobile phone controlled Robot
- flying Quad robot chopper with wireless video camera
- GPS and Digital Compassed based self navigating robot
- Bomb displacing robot with wireless video camera controlled form PC/Laptop
- GSM (SMS) Mobile Phone Controlled Intelligent Robot
- Wireless Voice and image transmission robot for surveillance system
- Infrared Light tracing Robot (TV Remote controlled)
- Live Human detection and alerting Robot
- Micro Electro Mechanical Sensor (MEMS) Accelerometer/Gyroscope based self-balancing robot
- Mobile phone Bluetooth operated robot
- Mobile phone controlled four-legged walking robot with speed and direction control
- Obstacle detection robot with mechanical sensing switches
- Obstacle detection Robot with Ultrasonic Sensors
- PC Controlled Wired Robot
- Wireless operated war field land Rover that alerts on sensing planted Land Mines
- Human-robot interface using robust speech recognition
- PC controlled wireless Multipurpose robot
- Wireless operated Fire extinguisher Robot with water jet spray
- Remote Controlled Land Rover
- Robot Controlled Wireless Audio-Video Streaming Camera
- Servo motor controlled wireless video camera control system
- Wall Follower Robot
- speech controlled wireless elevator system
- Speech recognition robot with ultrasonic obstacle avoidance system
- Touch Screen Controlled intelligent robot
- Voice operated Intelligent Fire extinguisher vehicle